


▣ 먼저 Actor를 생성하고 Static Mesh를 추가합니다.

▣ 해당 Static Mesh에 들어가서 Collstion을 추가합니다.

▣ Static Mesh에 디테일탭에서 Simulate Physics를 체크합니다.
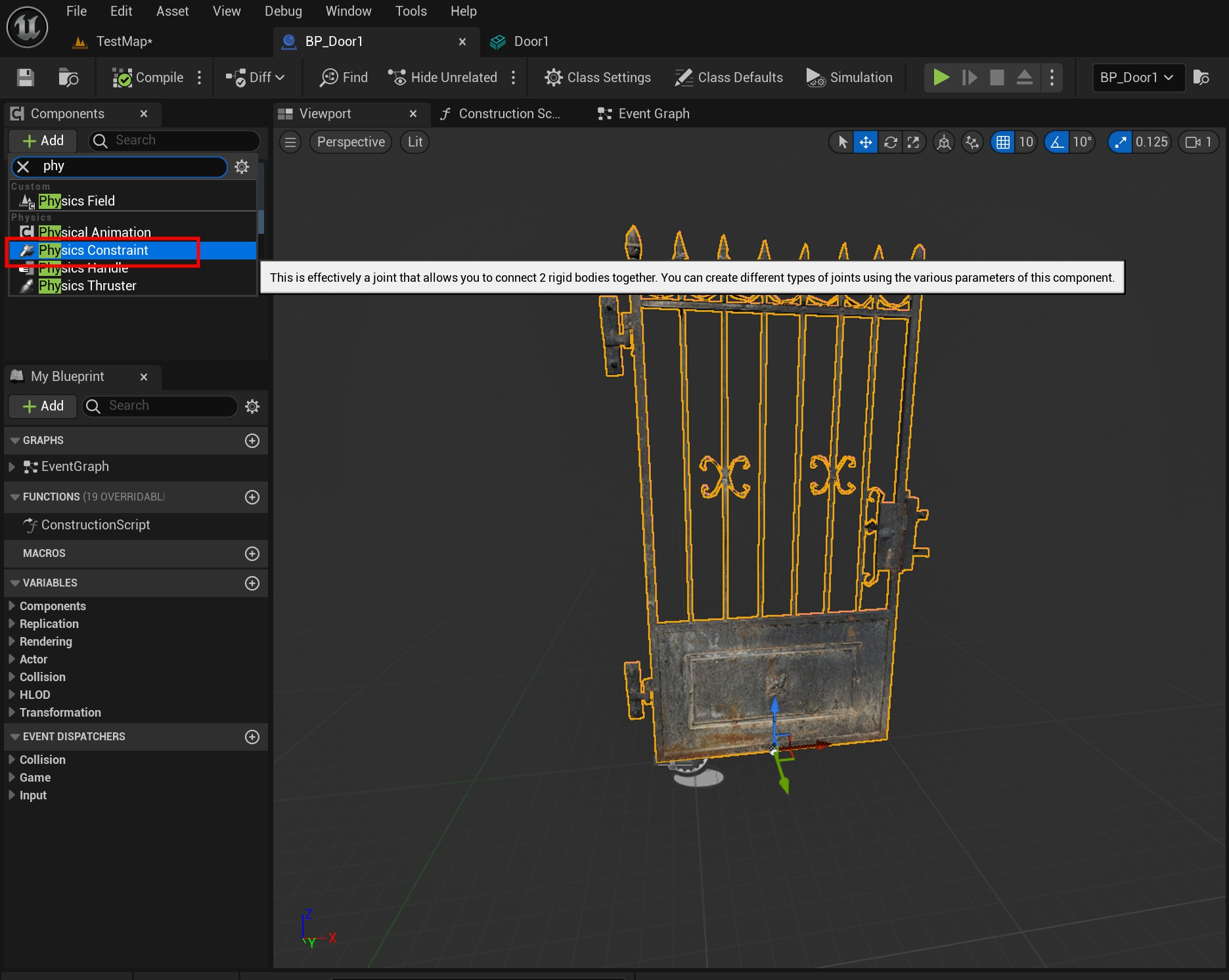
▣ Phsics Constraint를 추가합니다.
피직스 컨스트레인트 레퍼런스
언리얼 에디터의 피직스 컨스트레인트에서 사용할 수 있는 모든 프로퍼티에 대한 레퍼런스입니다.
docs.unrealengine.com

▣ PhsicsConstraint에 Component Name을 Static Mesh 이름으로 지정합니다.
▣ 컴포넌트 이름 1 - 제약시킬 첫 번째 대상 컴포넌트입니다. 액터를 사용할 때 액터 루트가 아닌 특정 컴포넌트만 제약시키고자 할 때 지정하면 됩니다.

▣ 그리고 해당 PhysicsContraint에 대한 디테일 값을 조절합니다.
▣ Linear Limits에 X, Y, Z에 대한 Motion을 Locked 하고
스윙 1 모션을 Limited 하여 한계 값을 지정합니다.
Angular Drive Mode를 Twist and Swing로 지정하고 Swing을 체크한 다음에 Strength를 조절합니다.
▣ Limited 이 축에는 자유가 제약됩니다. 각각의 각 운동에 대한 한계는 Swing 1 Limit Angle , Swing 2 Limit Angle , Twist Limit Angle 등 한계 프로퍼티 이름으로 개별 제어 가능합니다.
▣ Angular Drive Mode
각 구동 모드 - 이 각 모터에서 SLERP (Sphereical Linear Interpolation, 구체형 선형 보간)을 사용할지, Swing Motor 및 Twist Motor (콘 및 롤 컨스트레인트)로 분해할지 여부입니다. 각 컨스트레인트가 잠긴 경우 SLERP는 작동하지 않습니다.
- SLERP
구체형 선형 보간 - 모터를 SLERP (Spherical Linear Interpolation) 모드로 설정합니다. SLERP 모드는 각 컨스트레인트 축이 잠긴 경우 작동하지 않습니다.
- Twist and Swing
트위스트 및 스윙 - 모터를 Twist and Swing (콘 및 롤 컨스트레인트) 모드로 설정합니다.
- Strength
목표 속도에 도달하기 위해 적용할 힘입니다.

▣ 컴파일 저장 후 문에 닿으면 해당 방향으로 문이 회전되는 걸 확인할 수 있습니다.
'[ Unreal5 ] > - 언리얼엔진5 실습' 카테고리의 다른 글
| 언리얼엔진5 c++ AnimNotifyState (0) | 2024.06.19 |
|---|---|
| 언리얼엔진5 액터 병합하기 (0) | 2024.06.18 |
| 언리얼엔진5 c++ FOnMontageEnded(Montage종료시 호출 델리게이트) (0) | 2024.06.14 |
| 언리얼엔진5 c++ Timeline(Aim Zoom In Out) (0) | 2024.06.13 |
| 언리얼엔진5 블루프린트 단축키 (0) | 2024.06.12 |




댓글